- Published on
基于 LeRobot 和 LEAP Hand 的类人灵巧操纵系统
文章
第零阶段:复现 LEAP Hand
LEAP Hand仓库地址:https://v1.leaphand.com
由于之前的项目使用了LEAP Hand,所以已经对其进行了复现。
第一阶段:复现 LeRobot
LeRobot仓库地址:https://github.com/huggingface/lerobot
SO-100仓库地址:https://github.com/TheRobotStudio/SO-ARM100
SO-100成品图如下: 
购买成品材料
SO-100仓库提供了美国、欧洲和中国三个地区的购买链接,下面列出中国地区购买清单及链接,所有物品均可以在淘宝上选购并一次性购买。
- 材料清单:
| 部件 | 数量 | 人民币单价 | 中国 |
|---|---|---|---|
| STS3215 Servo | 12 | ¥97.72 | TaoBao |
| Motor Control Board | 2 | ¥27 | TaoBao |
| USB-C Cable 2 pcs | 1 | ¥23.9*2 | TaoBao |
| Power Supply | 2 | ¥22.31 | TaoBao |
| Table Clamp 4pcs | 1 | ¥9.2 | TaoBao |
| Screwdriver Set | 1 | ¥14.9 | TaoBao |
| 总计 | --- | ¥1343.16 | --- |
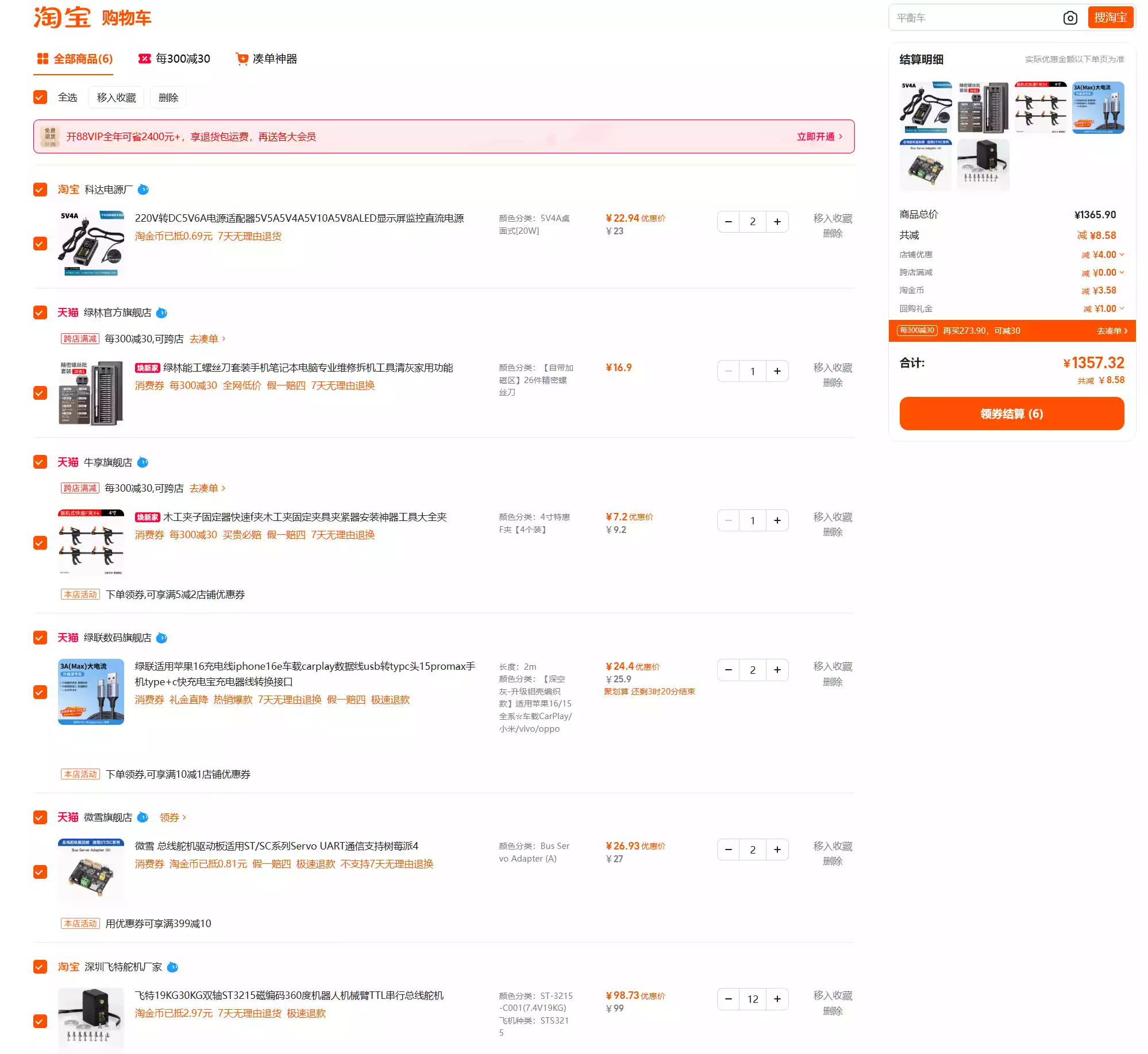
购买时间:2025年2月25日
实际支出:1363.32元
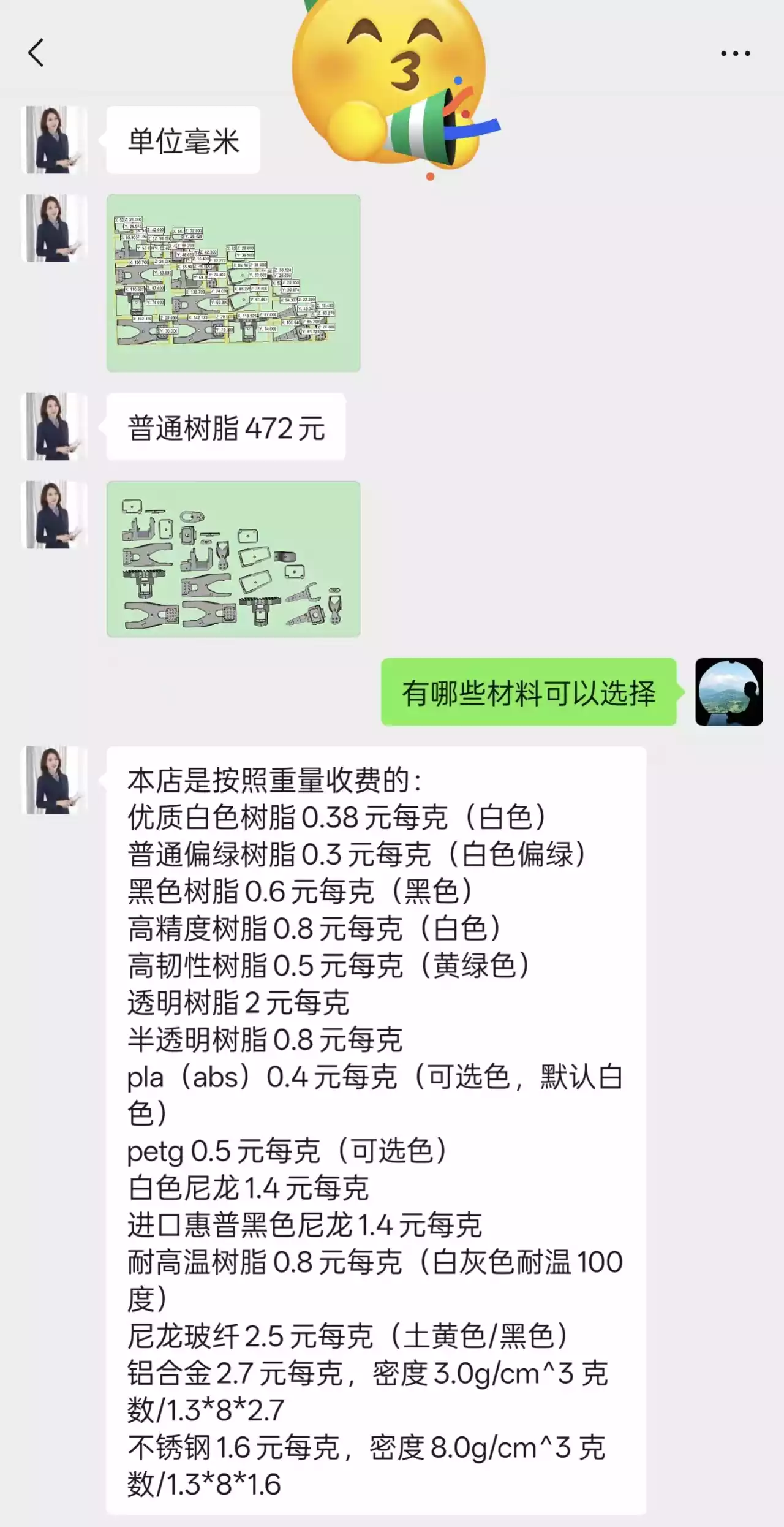
3D打印材料
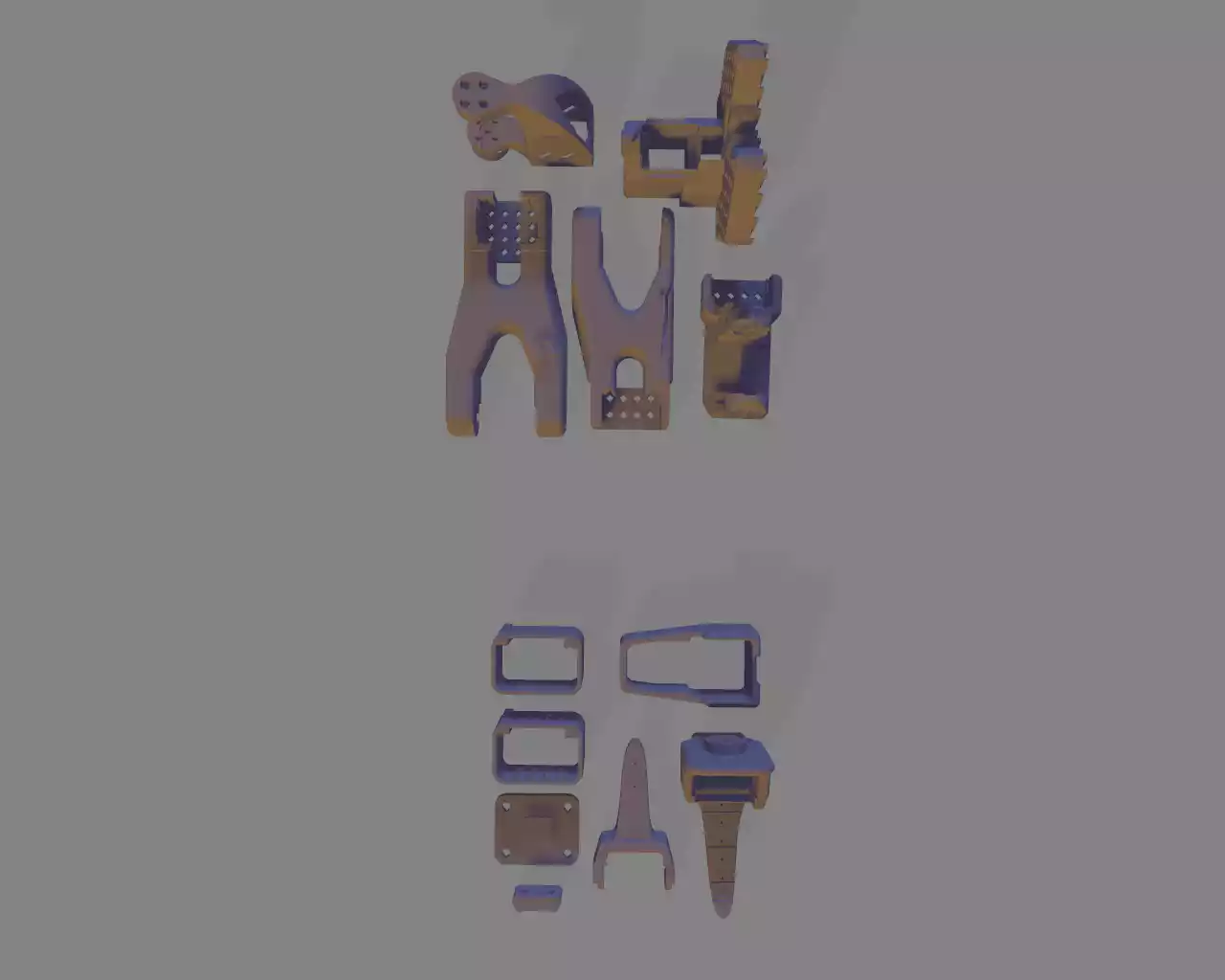 需要3D打印的材料结构如上,由于没有3D打印机,所以我在淘宝上寻找了一家3D打印服务提供商。
需要3D打印的材料结构如上,由于没有3D打印机,所以我在淘宝上寻找了一家3D打印服务提供商。 
购买时间:2025年2月26日
实际支出:472元
材料:PLA
手腕相机
手腕相机仓库地址:https://github.com/TheRobotStudio/SO-ARM100/tree/main/Optional/Camera_Holder
第二阶段:复现 Dummy
Dummy仓库地址:https://github.com/peng-zhihui/Dummy-Robot
第三阶段:集成 LEAP Hand 和 Dummy 以及 LeRobot
未开始
第四阶段:使用数据手套控制灵巧操纵系统
LucidGloves数据手套仓库地址:https://github.com/LucidVR/lucidgloves
这是一个会淡入并上滑的内容块
当用户滚动到这个区域时,内容会以动画形式出现。
发表评论
请登录后发表评论
评论 (0)
暂无评论,快来抢沙发吧!
目录
目录